










The column rank of a matrix A is the maximum number of linearly independent column vectors of A. The row rank of a matrix A is the maximum number of linearly independent row vectors of A. Equivalently, the column rank of A is the dimension of the column space of A, while the row rank of A is the dimension of the row space of A.
A result of fundamental importance in linear algebra is that the column rank and the row rank are always equal (see below for proofs). This number (i.e. the number of linearly independent rows or columns) is simply called the rank of A. It is commonly denoted by either rk(A) or rank A. Since the column vectors of A are the row vectors of the transpose of A (denoted here by AT), column rank of A equals row rank of A is equivalent to saying that the rank of a matrix is equal to the rank of its transpose, i.e. rk(A) = rk(AT).
The rank is also the dimension of the image of the linear transformation that is multiplication by A. More generally, if a linear operator on a vector space (possibly infinite-dimensional) has finite-dimensional range (e.g., a finite rank operator), then the rank of the operator is defined as the dimension of the range.
The maximum rank of an m × n matrix cannot be greater than the minimum of m and n. A matrix that has a rank as large as possible is said to have full rank; otherwise, the matrix is rank deficient.
Contents[hide]
|
[edit] Column rank = Row rank or rk(A) = rk(AT)
This result forms a very important part of the fundamental theorem of linear algebra. We present two proofs of this result. The first is short and uses only basic properties of linear combination of vectors. The second is an elegant argument using orthogonality and is based upon: Mackiw, G. (1995). A Note on the Equality of the Column and Row Rank of a Matrix. Mathematics Magazine, Vol. 68, No. 4. Interestingly, the first proof begins with a basis for the column space, while the second builds from a basis for the row space. The first proof is valid when the matrices are defined over any field of scalars, while the second proof works only on inner-product spaces. Of course they both work for real and complex euclidean spaces. Also, the proofs are easily adapted when A is a linear transformation.
First proof: Let A be an m×n matrix whose column rank is r. Therefore, the dimension of the column space of A is r. Let  be any basis for the column space of A and place them as column vectors to form the m×r matrix
be any basis for the column space of A and place them as column vectors to form the m×r matrix ![C = [c_1,c_2,\ldots,c_r]](http://upload.wikimedia.org/math/d/8/6/d869ca4bae7d0b6c1085c7566818e903.png) . From the definition of matrix multiplication, it follows that each column vector of A is a linear combination of the r columns of C. This means that there exists an r×n matrix R, such that A = CR. (The (i,j)-th element of R is the coefficient of ci when the j-th column of A is expressed as a linear combination of the r columns of C. Also see rank factorization.)
. From the definition of matrix multiplication, it follows that each column vector of A is a linear combination of the r columns of C. This means that there exists an r×n matrix R, such that A = CR. (The (i,j)-th element of R is the coefficient of ci when the j-th column of A is expressed as a linear combination of the r columns of C. Also see rank factorization.)
Now, since A = CR, every row vector of A is a linear combination of the row vectors of R, which means that the row space of A is contained within the row space of R. Therefore, we have row rank of A ≤ row rank of R. But note that R has r rows, so the row rank of R ≤ r = column rank of A. This proves that row rank of A ≤ column rank of A. Now apply the result to the transpose of A to get the reverse inequality: column rank of A = row rank of AT ≤ column rank of AT = row rank of A. This proves column rank of A equals row rank of A. See a very similar but more direct proof for rk(A) = rk(AT) under rank factorization. QED.
Second proof: Let A be an m×n matrix whose row rank is r. Therefore, the dimension of the row space of A is r and suppose that  is a basis of the row space of A. We claim that the vectors
is a basis of the row space of A. We claim that the vectors  are linearly independent. To see why, consider the linear homogeneous relation involving these vectors with scalar coefficients :
are linearly independent. To see why, consider the linear homogeneous relation involving these vectors with scalar coefficients :

where  . We make two observations: (a) v is a linear combination of vectors in the row space of A, which implies that v belongs to the row space of A, and (b) since Av = 0, v is orthogonal to every row vector of A and, hence, is orthogonal to every vector in the row space of A. The facts (a) and (b) together imply that v is orthogonal to itself, which proves that v = 0 or, by the definition of v:
. We make two observations: (a) v is a linear combination of vectors in the row space of A, which implies that v belongs to the row space of A, and (b) since Av = 0, v is orthogonal to every row vector of A and, hence, is orthogonal to every vector in the row space of A. The facts (a) and (b) together imply that v is orthogonal to itself, which proves that v = 0 or, by the definition of v:

But recall that the xi's are linearly independent because they are a basis of the row space of A. This implies that  , which proves our claim that are linearly independent.
, which proves our claim that are linearly independent.
Now, each Axi is obviously a vector in the column space of A. So, is a set of r linearly independent vectors in the column space of A and, hence, the dimension of the column space of A (i.e. the column rank of A) must be at least as big as r. This proves that row rank of A = r ≤ column rank of A. Now apply this result to the transpose of A to get the reverse inequality: column rank of A = row rank of AT ≤ column rank of AT = row rank of A. This proves column rank of A equals row rank of A or, equivalently, rk(A) = rk(AT). QED.
Finally, we provide a proof of the related result, rk(A) = rk(A*), where A* is the conjugate transpose or hermitian transpose of A. When the elements of A are real numbers, this result becomes rk(A) = rk(AT) and can constitute another proof for row rank = column rank. Otherwise, for complex matrices, rk(A) = rk(A*) is not equivalent to row rank = column rank, and one of the above two proofs should be used. This proof is short, elegant and makes use of the null space.
Third proof: Let A be an m×n matrix. Define rk(A) to mean the column rank of A and let A* denote the conjugate transpose or hermitian transpose of A. First note that A*Ax = 0 if and only if Ax = 0. This is elementary linear algebra - one direction is trivial; the other follows from:
- A*Ax = 0 ⇒ x*A*Ax = 0 ⇒ (Ax)*(Ax) = 0 ⇒ ‖Ax‖2 = 0 ⇒ Ax = 0,
where ‖·‖ is the Euclidean norm. This proves that the null space of A is equal to the null space of A*A. From the rank-nullity theorem, we obtain rk(A) = rk(A*A). (Alternate argument: Since A*Ax = 0 if and only if Ax = 0, the columns of A*A satisfy the same linear relationships as the columns of A. In particular, they must have the same number of linearly independent columns and, hence, the same column rank.) Each column of A*A is a linear combination of the columns of A*. Therefore, the column space of A*A is a subspace of the column space of A*. This implies that rk(A*A) ≤ rk(A*). We have proved: rk(A) = rk(A*A) ≤ rk(A*). Now apply this result to A* to obtain the reverse inequality: since (A*)* = A, we can write rk(A*) ≤ rk((A*)*) = rk(A). This proves rk(A) = rk(A*). When the elements of A are real, the conjugate transpose is the transpose and we obtain rk(A) = rk(AT). QED.
[edit] Alternative definitions
- dimension of image
If one considers the matrix A as a linear mapping
- f : Fn → Fm
such that
- f(x) = Ax
then the rank of A can also be defined as the dimension of the image of f (see linear map for a discussion of image and kernel). This definition has the advantage that it can be applied to any linear map without need for a specific matrix. The rank can also be defined as n minus the dimension of the kernel of f; the rank-nullity theorem states that this is the same as the dimension of the image of f.
- column rank – dimension of column space
The maximal number of linearly independent columns  of the m×n matrix A with entries in the field F is equal to the dimension of the column space of A (the column space being the subspace of Fm generated by the columns of A, which is in fact just the image of A as a linear map).
of the m×n matrix A with entries in the field F is equal to the dimension of the column space of A (the column space being the subspace of Fm generated by the columns of A, which is in fact just the image of A as a linear map).
- row rank – dimension of row space
Since the column rank and the row rank are the same, we can also define the rank of A as the dimension of the row space of A, or the number of rows  in a basis of the row space.
in a basis of the row space.
- decomposition rank
The rank can also be characterized as the decomposition rank: the minimum k such that A can be factored as A = CR, where C is an m×k matrix and R is a k×n matrix. Like the "dimension of image" characterization this can be generalized to a definition of the rank of a linear map: the rank of a linear map f from V → W is the minimal dimension k of an intermediate space X such that f can be written as the composition of a map V → X and a map X → W. While this definition does not suggest an efficient manner to compute the rank (for which it is better to use one of the alternative definitions), it does allow to easily understand many of the properties of the rank, for instance that the rank of the transpose of A is the same as that of A. See rank factorization for details.
- determinantal rank – size of largest non-vanishing minor
Another equivalent definition of the rank of a matrix is the greatest order of any non-zero minor in the matrix (the order of a minor being the size of the square sub-matrix of which it is the determinant). Like the decomposition rank characterization, this does not give an efficient way of computing the rank, but it is useful theoretically: a single non-zero minor witnesses a lower bound (namely its order) for the rank of the matrix, which can be useful to prove that certain operations do not lower the rank of a matrix.
Equivalence of the determinantal definition (rank of largest non-vanishing minor) is generally proved alternatively. It is a generalization of the statement that if the span of n vectors has dimension p, then p of those vectors span the space: one can choose a spanning set that is a subset of the vectors. For determinantal rank, the statement is that if the row rank (column rank) of a matrix is p, then one can choose a p × p submatrix that is invertible: a subset of the rows and a subset of the columns simultaneously define an invertible submatrix. It can be alternatively stated as: if the span of n vectors has dimension p, then p of these vectors span the space and there is a set of p coordinates on which they are linearly independent.
A non-vanishing p-minor (p × p submatrix with non-vanishing determinant) shows that the rows and columns of that submatrix are linearly independent, and thus those rows and columns of the full matrix are linearly independent (in the full matrix), so the row and column rank are at least as large as the determinantal rank; however, the converse is less straightforward.
- tensor rank – minimum number of simple tensors
The rank of a square matrix can also be characterized as the tensor rank: the minimum number of simple tensors (rank 1 tensors) needed to express A as a linear combination,  . Here a rank 1 tensor (matrix product of a column vector and a row vector) is the same thing as a rank 1 matrix of the given size. This interpretation can be generalized in the separable models interpretation of the singular value decomposition.
. Here a rank 1 tensor (matrix product of a column vector and a row vector) is the same thing as a rank 1 matrix of the given size. This interpretation can be generalized in the separable models interpretation of the singular value decomposition.
[edit] Properties
We assume that A is an m-by-n matrix over either the real numbers or the complex numbers, and we define the linear map f by f(x) = Ax as above.
- only a zero matrix has rank zero.

- f is injective if and only if A has rank n (in this case, we say that A has full column rank).
- f is surjective if and only if A has rank m (in this case, we say that A has full row rank).
- In the case of a square matrix A (i.e., m = n), then A is invertible if and only if A has rank n (that is, A has full rank).
- If B is any n-by-k matrix, then

- If B is an n-by-k matrix with rank n, then

- If C is an l-by-m matrix with rank m, then

- The rank of A is equal to r if and only if there exists an invertible m-by-m matrix X and an invertible n-by-n matrix Y such that

- where Ir denotes the r-by-r identity matrix.
- Sylvester’s rank inequality: If A is a m-by-n matrix and B n-by-k, then
-
 .[1]
.[1]
- This is a special case of the next inequality.
- The inequality due to Frobenius: if AB, ABC and BC are defined, then
-
 .[2]
.[2]
- Subadditivity:
 when A and B are of the same dimension. As a consequence, a rank-k matrix can be written as the sum of k rank-1 matrices, but not fewer.
when A and B are of the same dimension. As a consequence, a rank-k matrix can be written as the sum of k rank-1 matrices, but not fewer. - The rank of a matrix plus the nullity of the matrix equals the number of columns of the matrix (this is the "rank theorem" or the "rank-nullity theorem").
- The rank of a matrix and the rank of its corresponding Gram matrix are equal. Thus, for real matrices:
-
- This can be shown by proving equality of their null spaces. Null space of the Gram matrix is given by vectors x for which ATAx = 0. If this condition is fulfilled, also holds 0 = xTATAx = | Ax | 2. This proof was adapted from.[3]

- If A * denotes the conjugate transpose of A (i.e., the adjoint of A), then
-
 .
.
[edit] Rank from row-echelon forms
A common approach to finding the rank of a matrix is to reduce it to a simpler form, generally row-echelon form by row operations. Row operations do not change the row space (hence do not change the row rank), and, being invertible, map the column space to an isomorphic space (hence do not change the column rank). Once in row-echelon form, the rank is clearly the same for both row rank and column rank, and equals the number of pivots and the number of non-zero rows; further, the column space has been mapped to  which has dimension p.
which has dimension p.
[edit] Computation
The easiest way to compute the rank of a matrix A is given by the Gauss elimination method. The row-echelon form of A produced by the Gauss algorithm has the same rank as A, and its rank can be read off as the number of non-zero rows.
Consider for example the 4-by-4 matrix

We see that the second column is twice the first column, and that the fourth column equals the sum of the first and the third. The first and the third columns are linearly independent, so the rank of A is two. This can be confirmed with the Gauss algorithm. It produces the following row echelon form of A:
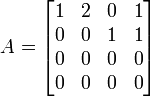
which has two non-zero rows.
When applied to floating point computations on computers, basic Gaussian elimination (LU decomposition) can be unreliable, and a rank revealing decomposition should be used instead. An effective alternative is the singular value decomposition (SVD), but there are other less expensive choices, such as QR decomposition with pivoting, which are still more numerically robust than Gaussian elimination. Numerical determination of rank requires a criterion for deciding when a value, such as a singular value from the SVD, should be treated as zero, a practical choice which depends on both the matrix and the application.
[edit] Applications
One useful application of calculating the rank of a matrix is the computation of the number of solutions of a system of linear equations. According to the Rouché–Capelli theorem, the system is inconsistent if the rank of the augmented matrix is greater than the rank of the coefficient matrix. If, on the other hand, ranks of these two matrices are equal, the system must have at least one solution. The solution is unique if and only if the rank equals the number of variables. Otherwise the general solution has k free parameters where k is the difference between the number of variables and the rank.
In control theory, the rank of a matrix can be used to determine whether a linear system is controllable, or observable.
[edit] Generalization
There are different generalisations of the concept of rank to matrices over arbitrary rings. In those generalisations, column rank, row rank, dimension of column space and dimension of row space of a matrix may be different from the others or may not exist.
Thinking of matrices as tensors, the tensor rank generalizes to arbitrary tensors; note that for tensors of order greater than 2 (matrices are order 2 tensors), rank is very hard to compute, unlike for matrices.
There is a notion of rank for smooth maps between smooth manifolds. It is equal to the linear rank of the derivative.
[edit] Matrices as tensors
Matrix rank should not be confused with tensor order, which is called tensor rank. Tensor order is the number of indices required to write a tensor, and thus matrices all have tensor order 2. More precisely, matrices are tensors of type (1,1), having one row index and one column index, also called covariant order 1 and contravariant order 1; see Tensor (intrinsic definition) for details.
Note that the tensor rank of a matrix can also mean the minimum number of simple tensors necessary to express the matrix as a linear combination, and that this definition does agree with matrix rank as here discussed.
[edit] See also
- Rank (differential topology)
- Nonnegative rank (linear algebra)
[edit] References
- ^ Proof: Apply the rank-nullity theorem to the inequality:
-
- ^ Proof: The map
 ; apply this inequality to the subspace defined by the (orthogonal) complement of the image of BC in the image of B, whose dimension is
; apply this inequality to the subspace defined by the (orthogonal) complement of the image of BC in the image of B, whose dimension is  ; its image under A has dimension
; its image under A has dimension 
- ^ Leonid Mirsky: An Introduction to Linear Algebra, 1990, ISBN 0486664341


[edit] Further reading
- Horn, Roger A. and Johnson, Charles R. Matrix Analysis. Cambridge University Press, 1985. ISBN 0-521-38632-2.
- Kaw, Autar K. Two Chapters from the book Introduction to Matrix Algebra: 1. Vectors [1] and System of Equations [2]
- Mike Brookes: Matrix Reference Manual. [3]







